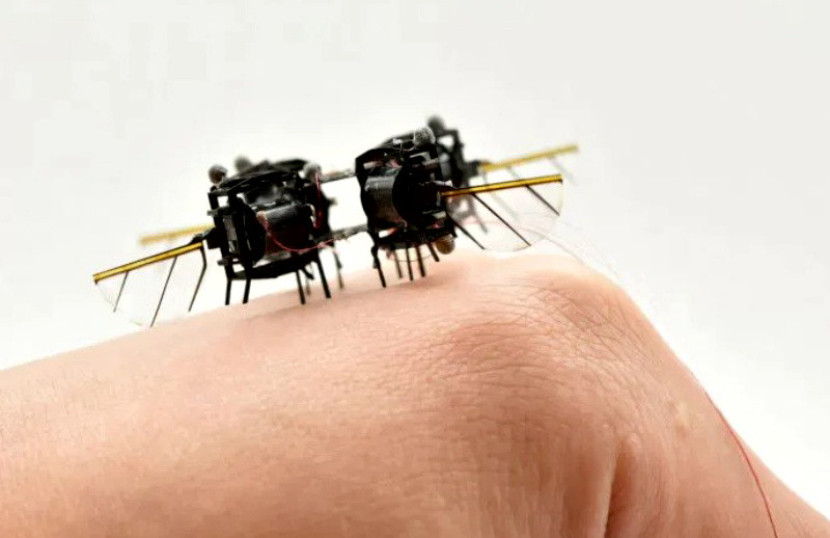
 Kelompok Chen telah membangun serangga robotik selama lebih dari lima tahun/MIT Soft and Micro Robotics Laboratory
Kelompok Chen telah membangun serangga robotik selama lebih dari lima tahun/MIT Soft and Micro Robotics LaboratoryRobot terbang mungil mungkin akan segera membantu menyelamatkan orang-orang yang terjebak setelah gempa bumi atau menjelajahi tempat-tempat berbahaya yang sulit dijangkau.
Namun hingga saat ini, mikrorobot ini lambat, rapuh, dan tidak mampu menandingi kecepatan dan akrobatik terbang serangga sungguhan.
Hal itu telah berubah dengan terobosan dari para peneliti MIT, yang telah menciptakan mikrorobot udara yang mampu terbang dengan kecepatan, kelincahan, dan presisi seperti lebah.
Robot baru mereka, yang dijelaskan dalam Science Advances, dapat melakukan putaran cepat, akselerasi agresif, dan bahkan salto senam—menyelesaikan 10 salto hanya dalam 11 detik.
Ini merupakan lompatan besar dalam performa: kecepatan meningkat hampir 450% dan akselerasi 250% dibandingkan versi sebelumnya.
Mikrorobot ini berukuran kecil—seukuran kaset mikro dan lebih ringan dari penjepit kertas.
Ia terbang menggunakan empat sayap yang mengepak cepat dan ditenagai oleh otot buatan yang lembut.
Otot-otot ini berkontraksi dan mengembang begitu cepat sehingga sayapnya mengepak ratusan kali per detik, persis seperti sayap serangga sungguhan.
Meskipun perangkat kerasnya telah ditingkatkan dalam beberapa tahun terakhir, bagian yang hilang adalah "otak" robot—pengendali penerbangannya.
Versi sebelumnya mengandalkan pengendali yang disetel secara manual yang ditulis oleh para insinyur, yang membatasi kemampuan robot untuk menangani manuver yang rumit dan cepat.
Untuk mengatasi hal ini, tim MIT yang dipimpin oleh Profesor Kevin Chen dan Profesor Jonathan How mengembangkan sistem kendali dua langkah berbasis AI yang baru.
Langkah pertama menggunakan pengendali model-prediktif, sebuah algoritma canggih yang mensimulasikan gerakan robot secara real-time dan menghitung tindakan terbaik yang memungkinkan untuk mengikuti jalur penerbangan yang direncanakan.
Pengendali jenis ini dapat merencanakan jungkir balik, belokan tajam, dan kemiringan ekstrem, tetapi membutuhkan daya komputasi yang terlalu besar untuk dijalankan langsung pada robot kecil.
Untuk mengatasi hal ini, para peneliti menggunakan pembelajaran imitasi—suatu bentuk kecerdasan buatan—untuk "mengajari" pengendali yang lebih sederhana untuk meniru perencana ahli.
Mereka memberi model AI ribuan contoh yang dihasilkan oleh pengontrol tingkat tinggi, melatihnya untuk memprediksi perintah gerakan terbaik hampir seketika.
Hasilnya adalah sistem pengambilan keputusan secepat kilat yang dapat berjalan secara real-time saat robot terbang.
Dengan pengontrol baru ini, mikrorobot menunjukkan refleks seperti serangga.
Ia tetap stabil bahkan ketika diterpa hembusan angin lebih dari satu meter per detik.
Ia mengulangi gerakan jungkir balik yang presisi tanpa menyimpang dari jalur dan berhasil melakukan gerakan sakade, perilaku yang digunakan serangga untuk mengubah arah dengan cepat dan menstabilkan penglihatan mereka.
Kemampuan ini membuka pintu bagi mikrorobot masa depan yang dapat menavigasi lingkungan yang berantakan, mencari di antara puing-puing, atau terbang di luar ruangan dengan kamera dan sensor internal.
Menambahkan fitur-fitur ini akan menjadi fokus langkah selanjutnya para peneliti.
Mereka juga berharap dapat mengembangkan sistem yang memungkinkan beberapa mikrorobot untuk berkoordinasi satu sama lain dan menghindari tabrakan selama penerbangan.
Para ahli dari luar memuji penelitian ini sebagai tonggak penting. Sarah Bergbreiter dari Carnegie Mellon University mencatat bahwa robot ini masih dapat terbang dengan presisi meskipun menghadapi tantangan seperti angin, proses manufaktur yang tidak sempurna, dan kabel dayanya yang kusut saat berputar.
Ia mengatakan pendekatan ini mengarah pada robot skala serangga yang benar-benar otonom dengan kelincahan alami.
Untuk saat ini, pengontrolnya berjalan di komputer eksternal, tetapi tim yakin versi yang disederhanakan suatu hari nanti dapat beroperasi langsung di dalamnya.
Jika berhasil, mikrorobot ini dapat menjadi alat yang ampuh untuk tanggap bencana, pemantauan lingkungan, atau bahkan dukungan penyerbukan.
Terobosan ini menunjukkan bahwa impian penerbangan robotik tingkat serangga bukan lagi fiksi ilmiah—melainkan telah menjadi kenyataan.



































:strip_icc():format(jpeg)/kly-media-production/medias/5442317/original/061837000_1765533575-cheesecake-3660900_1280.jpg)